# 第二章 各种各样的数学
大多数图形只是将数学公式直接转为代码。因此,数学公式越简洁,最后转换出来的代码越简洁明了;这本书的大部分内容都集中在使用正确的数学公式来完成这项工作。本章将回顾高中和大学中所学的数学知识,因此本章可以视为是一份参考,而不是一份教程。它其实就是一个数学大杂烩,选择每一个小节是因为它们在“标准”的数学课程中有点不同寻常,也因为它们在图形学中很重要,并且通常不是从几何学的角度来处理。本章除了建立对本书中所使用的数学符号的回顾,还强调了在标准大学本科课程中跳过的一些知识点,例如:三角形中的质心坐标。并且本章不会严格证明这些数学知识,更多的强调直觉和几何解释。关于线性代数的讨论推迟到第 5 章,放在第 6 章变换矩阵之前。我们鼓励读者浏览本章熟悉涉及到的知识点,并且在需要的时候回顾它们。章末的练习题能够帮助读者审查自对知识点的熟悉程度,从而回顾的对应的知识点。
# 2.1 集合和映射
映射(Mappings),也称为函数(Functions),是数学和编程的基础。如同编程中的函数,数学中的映射会接受一种类型的入参,然后映射到(返回)特定类型的对象。编程中我们提到的“类型”,在数学中被定义为集合(set)。若一个对象是某个集合中的元素,我们使用符号 ∈ 来表示这种关系。例如:a ∈ S,可以被解读为“a 是集合 S 中的一个元素”。给定任意两个集合A和B,可以通过求它们的笛卡尔积(Cartesian product)得到第三个集合,记为:A × B。集合 A x B 是由所有可能的有序对 组成,其中a ∈ A,b ∈ B。为了简写,可以使用符号表示集合A × A。我们可以扩展笛卡尔积,从三个集合中创建所有可能的有序三元组,以此类推,更多的集合可以创建不同的有序元组。
常用的集合包括
- : 实数集
- : 正实数(包括 0)
- : 二维平面上的一个有序对
- : n 维笛卡尔空间中的点
- : 整数
- : 单位球面上的三维点的集合(中的点)
记住,虽然是由嵌入三维空间的点组成的,但它们是在一个可以用两个变量进行参数化的曲面上,所以可以把它看作是一个二维集合。映射的表示方式采用箭头和冒号,例如:。你可以看作“有一个函数 f,接受一个实数作为入参且映射到了一个整数上面。”箭头左边的集合称为该函数的域,箭头右边则称为函数的目标。程序员可能更容易这么理解:“有一个函数 f,入参是一个实数,函数返回一个整数。”换句话说,上述集合的表示形式等价于一般程序的表示形式:。因此,冒号箭头的形式可以简单看出是程序语法。
点称为 a 的映像,集合A(a 的值域子集)的映像是包含A 中所有点的映像的子集。整个值域的映像称为函数的范围。
# 2.1.1 逆映射
如果存在一个函数,同时可能存在一个逆函数,这是由 定义,其中。该定义成立当且仅当每一个b ∈ B是函数下某个点映像(即值域等于目标),并且只存在一个这样的点(即只能找到唯一一个满足)。像这种映射或函数被称为“双射”(bijections)。双射将每一个a ∈ A映射到唯一的b ∈ B上,对于每一个b ∈ B,存在一个特定的a ∈ A使得。如图:
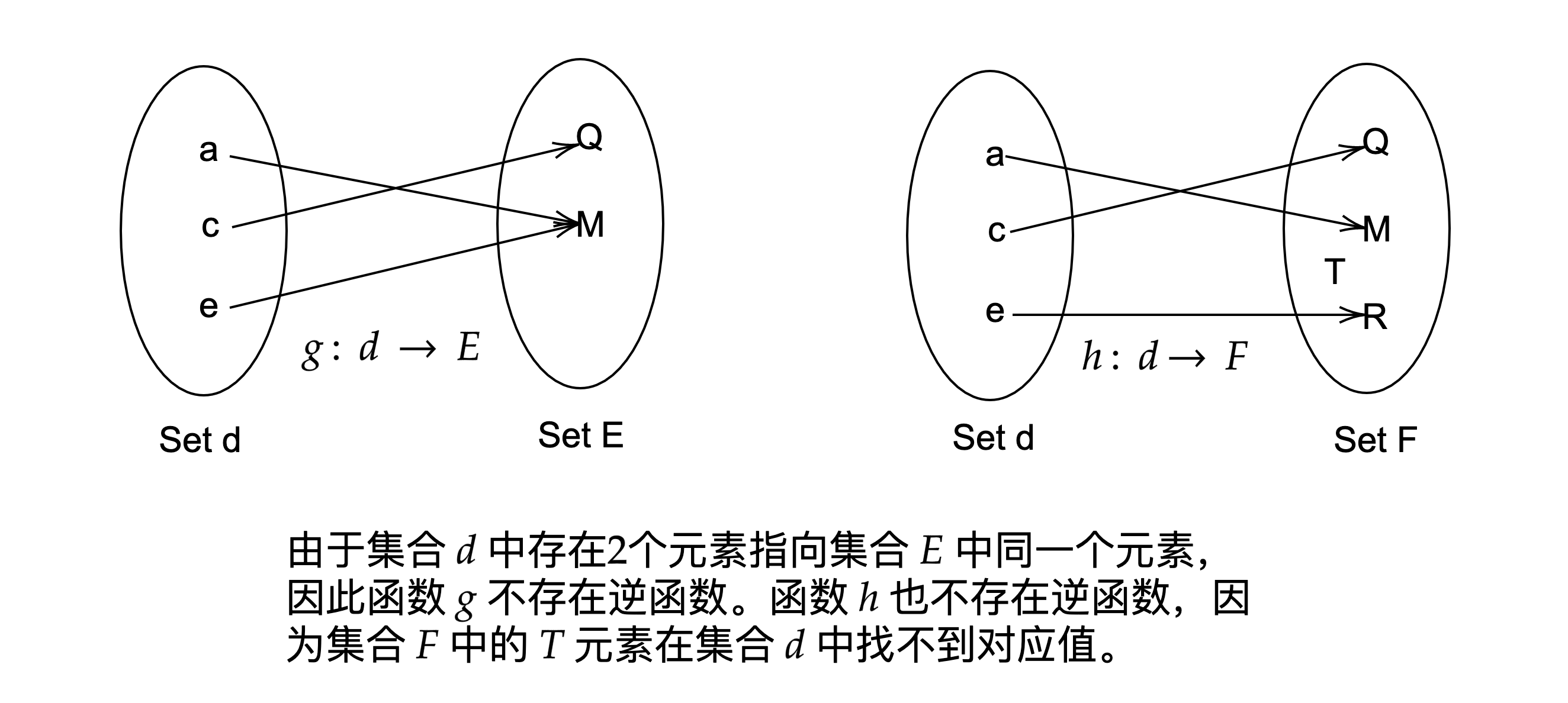
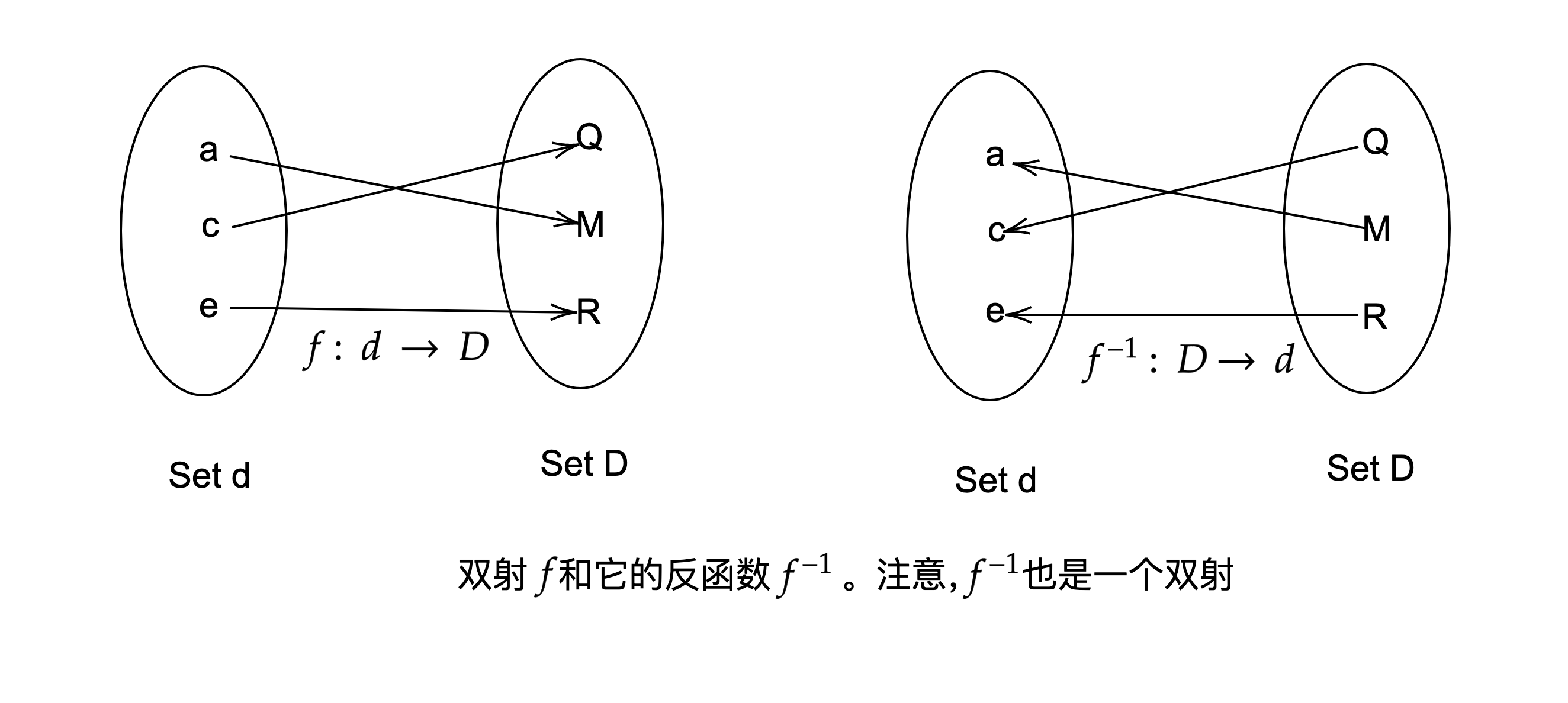 用骑手和马来举例,他们之间的双射可以表示为每一个骑手都会骑一匹马,而每一匹马都被骑手骑。相关的函数为骑手(马)和马(骑手),它们之间互为逆函数。若函数不是双射,则没有逆函数。如图:
用骑手和马来举例,他们之间的双射可以表示为每一个骑手都会骑一匹马,而每一匹马都被骑手骑。相关的函数为骑手(马)和马(骑手),它们之间互为逆函数。若函数不是双射,则没有逆函数。如图:
 一个双射函数的例子:,满足。它的逆函数是。这个例子表明,标准表示法可能有些笨拙,因为在和f^{−1}中都被用作伪变量。有时候为了更加直观,可以使用不同的伪变量,比如,和。因此,上面的例子可以表示为和。再举一个非双射函数的例子:,满足。两点原因:1.;2.值域中不存在目标的负数部分。注意:当我们限制值域为时,可以定义一个逆函数,这时,是一个有效的逆函数。
一个双射函数的例子:,满足。它的逆函数是。这个例子表明,标准表示法可能有些笨拙,因为在和f^{−1}中都被用作伪变量。有时候为了更加直观,可以使用不同的伪变量,比如,和。因此,上面的例子可以表示为和。再举一个非双射函数的例子:,满足。两点原因:1.;2.值域中不存在目标的负数部分。注意:当我们限制值域为时,可以定义一个逆函数,这时,是一个有效的逆函数。